Differential Drive & SLAM from Scratch
Wrote all software for differential drive with (dead reckoning) odometry. Then, implemented an extended kalman filter for SLAM.
Overview
In this project, I took a Turtlebot3 Burger and removed all the preinstalled ROS software.
Then, I wrote, tested, and implemented my own C++ scripts for 2D transformations, differential drive, odometry, and SLAM.
This project served as a learning experience in ROS/C++ and demonstrates my knowledge of robotic software development.
The only robotic software in this project that I did not code myself is the microcontroller level C code.
Setup
Robot Visualization
I started this project by creating a
ROS package for robot visualization
in Rviz.
This was the first step in the simulation process.
It was imperative to test my software in simulation prior to deploying new features onto the physical robot.
The controlled simulation environment simplifies the process of finding a correcting errors in my code.
This ROS package utilizes the URDF files written by the TurtleBot manufacturer to display the Robot in Rviz.
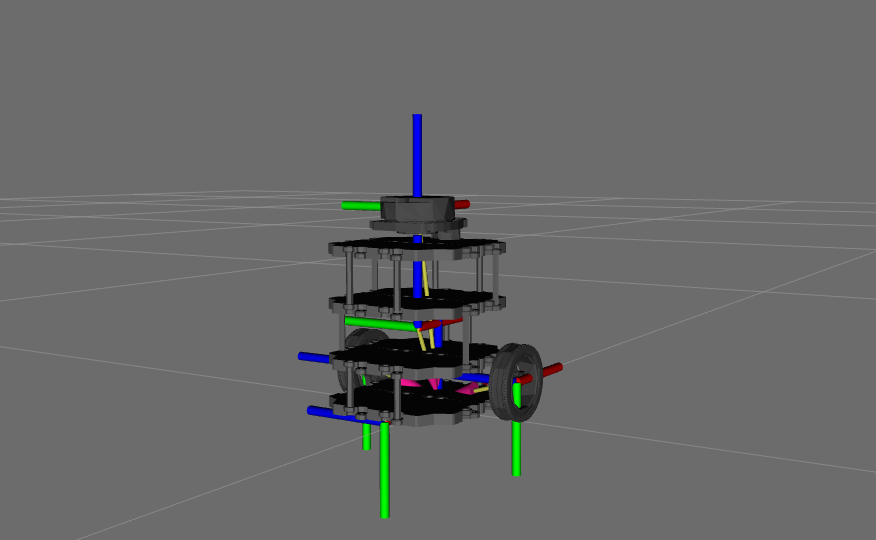
Figure 1. Turtlebot visualization in Rviz. Image also shows the reference frames within the robot.
2D Tranformations
Due to the math involved in differential drive and odometry, I decided to write a C++ library for 2D transformations. The library provides data structures for 2D transformations, vectors, and twists. I wrote standard operator overload methods for addition, subtraction, and multiplication as well as methods for applying transformations to vectors and twists. The library was heavily tested. It serves as the backbone to all the software a created from this point.
Kinematics
Differential drive robots are controlled by a twist representing body velocity and angular velocity. This means to control the robot, I needed to calculate the wheel velocities that achieve the desired twist. I used the following diagram to derive the relationship between wheel velocities and body twist.
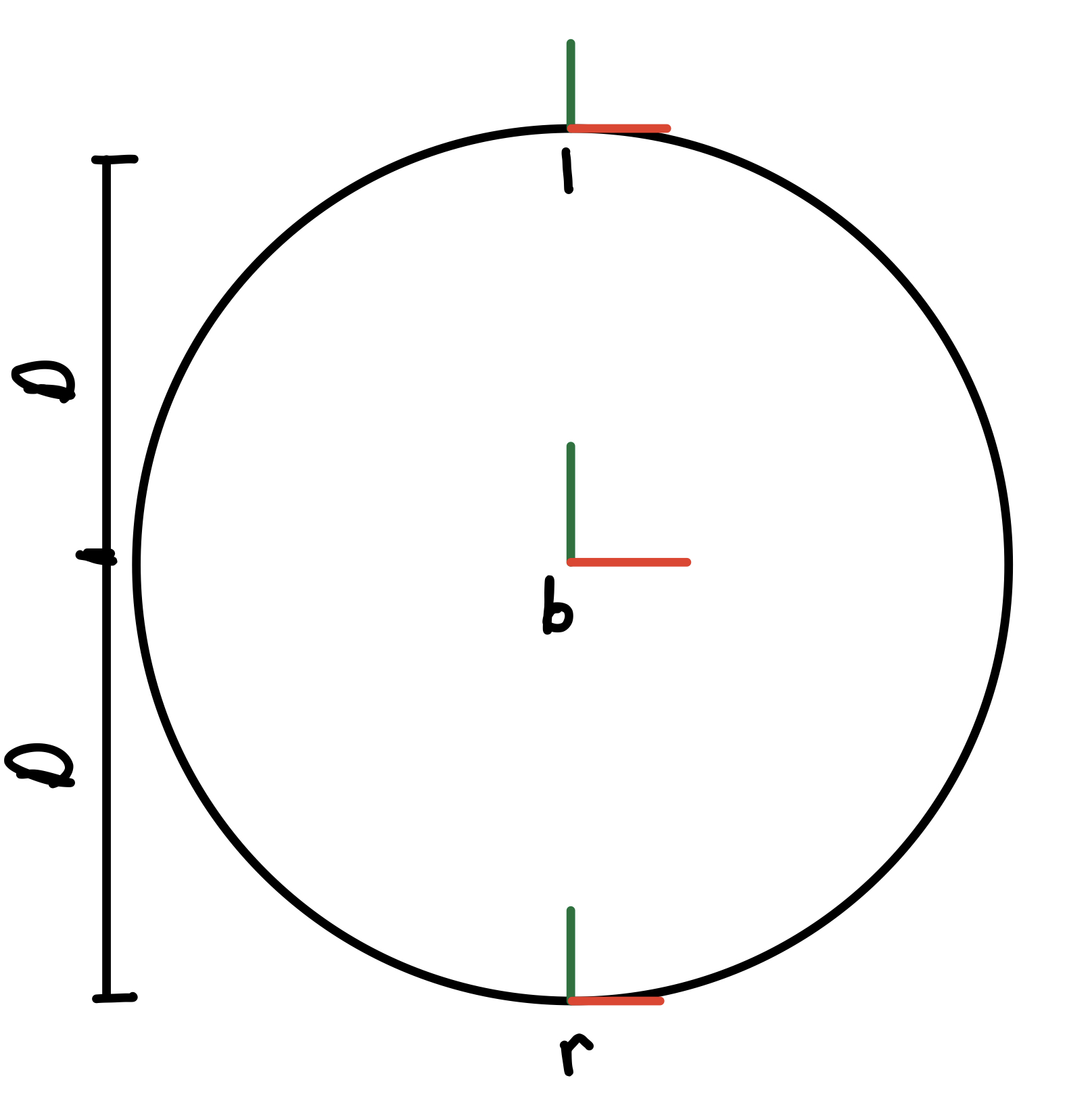
Figure 2. Reference frames for TurtleBot. X axes are in red and y axes are in greed. Frame b is the body, r is the right wheel, and l is the left wheel.
To start the derivation, I wrote the transformation matricies from the body to the wheels.
$$T_{bl} = \begin{bmatrix} 1 & 0 & 0\\ 0 & 1 & D \\ 0 & 0 & 1 \end{bmatrix} \hspace{20mm}
T_{br} = \begin{bmatrix} 1 & 0 & 0\\ 0 & 1 & -D \\ 0 & 0 & 1 \end{bmatrix}$$
Then, I wrote the adjoint matricies between the body and wheels.
$$A_{bl} = \begin{bmatrix} 1 & 0 & 0\\ D & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \hspace{20mm}
A_{br} = \begin{bmatrix} 1 & 0 & 0\\ -D & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}$$
$$A_{lb} = \begin{bmatrix} 1 & 0 & 0\\ -D & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \hspace{20mm}
A_{rb} = \begin{bmatrix} 1 & 0 & 0\\ D & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}$$
The following equation is used to relate twist in the wheel frame to the control.
$$\begin{equation} \begin{bmatrix} \dot{x_i} \\ \dot{y_i} \end{bmatrix} = \begin{bmatrix} r\dot{φ}_i \\ 0 \end{bmatrix} \end{equation}$$
r is the wheel radius
\(\dot{φ}\) is the rotational velocity
i is the wheel (l or r in this case)
Now, I can rewrite the body twist in the wheel frames.
$$V_b = \begin{bmatrix} \dot{θ} \\ \dot{x} \\ \dot{y} \end{bmatrix} \hspace{20mm}
V_i = \begin{bmatrix} \dot{θ} \\ r\dot{φ}_i \\ 0 \end{bmatrix}$$
Since I am calculating controls, I want to solve for \(\dot{φ}_i\) in terms of D, r, \(\dot{θ}\), and \(\dot{x}\).
I used the following relationships to do so.
$$V_l = A_{lb}V_b$$
$$\begin{bmatrix} \dot{θ} \\ r\dot{φ}_l \\ 0 \end{bmatrix} =
\begin{bmatrix} 1 & 0 & 0\\ -D & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} \dot{θ} \\ \dot{x} \\ \dot{y} \end{bmatrix}$$
$$\begin{equation} \mathbf{\dot{φ}_l = \frac{-D\dot{θ}+\dot{x}}{r}} \end{equation}$$
$$V_r = A_{rb}V_b$$
$$\begin{bmatrix} \dot{θ} \\ r\dot{φ}_r \\ 0 \end{bmatrix} =
\begin{bmatrix} 1 & 0 & 0\\ D & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}
\begin{bmatrix} \dot{θ} \\ \dot{x} \\ \dot{y} \end{bmatrix}$$
$$\begin{equation} \mathbf{\dot{φ}_r = \frac{D\dot{θ}+\dot{x}}{r}} \end{equation}$$
With the rigid2d library, I implemented the kinematics for differential drive in a class called diff_drive.
I wrote a ROS node called fake_turtle
that converts body velocities to wheel controls the publishes the controls.
This allowed me to visualize the code in Rviz.
Figure 3. Robot kinematics demostrated in simulation. Kinematics enable robot to move with translation and/or rotation.
Odometry
To make the robot move in simulation, I needed to implement odometry.
There are two ways I could have done this, using IMU or dead reckoning.
The original TurtleBot software uses IMU which is often inaccurate due to sensor noise.
I decided to use dead reckoning.
This method uses the change in wheel angles to calculate the robot's location.
It performs best on flat planes with minimal slip.
Since I typically drive the Turtlebot on a wood floor with good traction, this was the obvious choice.
The first step to dead reckoning is obtaining the angular velocities of the wheels.
Using the wheel encoders, I was able to measure the the angular velocities.
Then I calculated the body twist by rearranging equations (2) and (3).
$$\begin{equation} V_b = \begin{bmatrix} \dot{θ} \\ \dot{x} \\ \dot{y} \end{bmatrix} =
\begin{bmatrix} \frac{r(\dot{φ}_r-\dot{φ}_l)}{2D} \\ \frac{r(\dot{φ}_r+\dot{φ}_l)}{2} \\ 0 \end{bmatrix} \end{equation}$$
The next step is integrating the twist \(V_b\) to find the change in position and orientation \(T_{bb'}\) where {b} is the original body frame and {b'} is the body frame after movement.
You could do this using matrix exponentials, but that is computationally expensive.
In 2D, there are more efficient methods.
When integrating the twist in 2D, there are two scenarios.
Sceneraio 1: Translation without Rotation
In the case \(V_b\) has no rotational component, \(T_{bb'}\) is a pure translation determined by the twist.
$$V_b = \begin{bmatrix} 0 \\ \dot{x} \\ \dot{y} \end{bmatrix} \hspace{20mm}
T_{bb'} = \begin{bmatrix} 1 & 0 & \dot{x}\\ 0 & 1 & \dot{y} \\ 0 & 0 & 1 \end{bmatrix}$$
Scenario 2: Translation with Rotation
In the case \(V_b\) has translational and rotational comopnents, the math gets more complicated.
For any two unit vectors (vector a and vector b) on a plane, there is a pure rotation that transforms vector a to vector b.
Finding the center of rotation in the frame aligned with {b} is the first step to integrate the twist.
I will refer to frame {s} as the frame at the center of rotation in the orientation of frame {b}.
I will refer to frame {s'} as the frame at the center of rotation in the orientation of frame {b'}.
I determined the location of frame {s} using the adjoint.
$$\begin{bmatrix} 1 & 0 & 0\\ y_{s} & 1 & 0 \\ -x_{s} & 0 & 1 \end{bmatrix}
\begin{bmatrix} Δ θ \\ Δ x_{b} \\ Δ y_{b} \end{bmatrix} =
\begin{bmatrix} \dot{θ} \\ 0 \\ 0 \end{bmatrix}$$
Solving for \(x_{s}\) and \(y_{s}\) gives you \(T_{bs}\)
$$T_{bs} = \begin{bmatrix} 1 & 0 & x_{s} \\ 0 & 1 & y_{s} \\ 0 & 0 & 1 \end{bmatrix}$$
Next, I determined Tss' which is a pure rotation.
$$T_{ss'} = \begin{bmatrix} \cos{\dot{θ}} & -\sin{\dot{θ}} & 0 \\ \sin{\dot{θ}} & \cos{\dot{θ}} & 0 \\ 0 & 0 & 1 \end{bmatrix}$$
The last piece was determining \(T_{s'b'}\).
Because frame {s} is the center of rotation between frame {b} and frame {b'}, we can think of frame {s} as the center of a circle with frames {b} and {b'} on the circle's circumference.
Because frame {s} is oriented with {b} and frame {s'} is oriented with {b'}, \(T_{bs} = T_{s'b'}\). Finally, to solve for \(T_{bb'}\) we can use the following equation.
$$\begin{equation} T_{bb'} = T_{bs}T_{ss'}T_{s'b'} \end{equation}$$
Now that we characterized all robotic movements, we need to track the robot. This step is simple.
\(T_{wb}\) is the transformation from the world frame to the robot.
\(T_{bb'}\) is calculated everytime the robot moves.
To update the robots location, I used the following equation everytime the robot moved.
$$\begin{equation} T_{wb'} = T_{wb}T_{bb'} \end{equation}$$
$$T_{wb} = T_{wb'}$$
The C++ implementation for the integrate twist function can be found
here.
Once all the math for odometry was implemented, I wrote a
ROS node called odometer
that calculates and publishes odometry using the robot joint states.
This enabled the robot to move around the Rviz simulation environment.
Odometry Experiments
I performed experiments using the physical robot to ensure my calculations were accurate.
All experiments were executed via teleoperation.
Experiment 1 (Pure Translation):
Drive robot forward and backward in straight line. Stop at initial configuration. Record odometry values.
Figure 4. Video of experiment 1 in progress.
Results
x = 0.0302 m
y = 0.0165 m
\(θ\) = 0.000600 rad
Experiment 2 (Pure Rotation):
Drive robot in place clockwise and counter clockwise. Stop at initial configuration. Record odometry values.
Figure 5. Video of experiment 2 in progress.
Results
x = 0.0000445 m
y = -0.0000181 m
\(θ\) = 0.180 rad
Experiment 3 (Translation & Rotation):
Drive robot in circle clockwise and counter clockwise. Stop at initial configuration. Record odometry values.

Figure 6. Video of experiment 3 in progress.
Results
x = -0.0290 m
y = 0.0633 m
\(θ\) = 0.398 rad
Experiment 4 (Translation & Rotation):
Drive robot in circle clockwise and counter clockwise. Stop at initial configuration. Record odometry values.
This is the same as experiment 3 but the robot is moving significantly faster and the circle radius is larger.
Figure 7. Video of experiment 4 in progress.
Results
x = -0.282 m
y = 0.205 m
\(θ\) = 1.74 rad
SLAM in Simulation
At this point in the project, I am able to teleoperate the TurtleBot and accurately track its location. This is the framework for the real challenge in this project, SLAM using and Extended Kalman Filter (EKF). To simplify the SLAM problem, I am using 10 cylindrical landmarks of equal radius. I will use these landmarks for robot localization. The robot will only be trained to recognize and use these landmarks in the EKF.

Figure 8. SLAM pipeline. Lidar data is the input. Circle regression determines which data are landmarks. Data association matches circles found in the lidar data with initialized landmarks from SLAM. The associated data is then used the refine the SLAM estimate.
To simplify the software developement required for thie pipeline. I started with SLAM in simulation.
This allowed me to develop and test the EKF prior to attempting circle regression and data association.
Simulation Setup
Currently in simluation, the odometry data gives me the ground truth location of the robot. This makes SLAM useless. I needed to add noise to my simulation to make it more like the real world. I added gaussian noise to the commanded twist and introduced slip to the wheel angels. This made my odometry data less accurate, as the robot moved. Next, I added cylinders to the simulation environment to represent to landmarks. By adding gaussian noise to the ground truth landmark locations I was able to simulate the lidar data, circle regression, and data association in the SLAM pipeline. All of the simulation setup was done in a ROS node named tube_world.
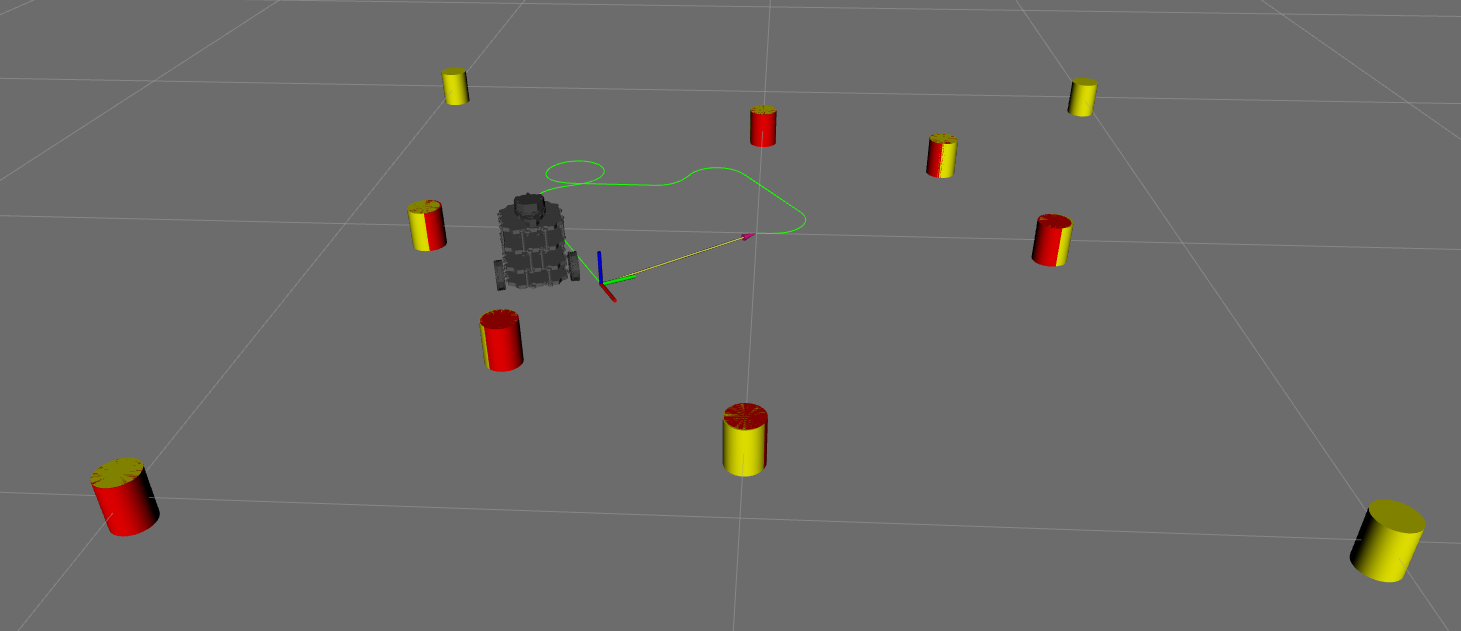
Figure 9. SLAM simulation environment. The yellow cylinders are the landmarks. The red cylinders are the landmark locations with noise. Some yellow cylinders do not have a red counterpart because they are too far from the robot for the robot to sense. The green path following the stray axis is the ground truth location of the robot. This is different than where the robot appears in the simulation due to wheel slip.
EKF SLAM Implementation
With my simulation setup, I needed to use the noisy landmark locations to localize the robot in the simulation.
By tracking the robot's ground truth location, odometry location, and SLAM location, as the robot moved in the environment I would be able to assess whether or not the algorithm was working.
I split the algorithm into 3 parts and created a C++ library named nuslam
with all the functions necessary for the EKF.
Initialization
I started intializing the state of the environment.
$$q_{t} = \begin{bmatrix} θ \\ x \\ y \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ 0 \end{bmatrix} \hspace{20mm}
m_{t} = \begin{bmatrix} m_{{x}_{1}} \\ m_{{x}_{1}} \\ \textrm{...} \\ m_{{x}_{n}} \\ m_{{y}_{n}} \end{bmatrix} =
\begin{bmatrix} 0_{2n \textrm{ x } 1} \end{bmatrix} \hspace{20mm}
ξ_{t} = g(ξ_{t-1},u_{t},w_{t}) = \begin{bmatrix} q_{t} \\ m_{t} \end{bmatrix} = \begin{bmatrix} 0_{2n+3 \textrm{ x } 1} \end{bmatrix}$$
\(q_{t}\) is the current robot state estimate
\(m_{t}\) is the current landmark state estimate
\(n\) is the max number of landmarks
\(ξ_{t}\) is the current state estimate of the entire environment
\(g(ξ_{t-1},u_{t},w_{t})\) is a transition function modeling the robot and map's movement
\(u_{t}\) is the odometry model derived in the previous section
\(w_{t}\) is the process noise in the system
Then, I initialized the state covariance matrix.
$$Σ_{0} = \begin{bmatrix} Σ_{0,q} & 0_{3 \textrm{x} 2n} \\ 0_{2n \textrm{x} 3} & Σ_{0,m} \end{bmatrix}$$
\(Σ_{0,q} \in \mathbb{R}^{3 \textrm{x} 3}\) is the covariance of the robot state
\(Σ_{0,m} \in \mathbb{R}^{2n \textrm{x} 2n}\) is the covariance of the landmark state matrix
\(Σ_{0,q}\) was initialized to all zeros because the initial state of the robot is known.
\(Σ_{0,m}\) was initialized as a diagonal matrix with infinity on the diagonal because the landmark locations are unknown to the robot.
Lastly, I initialized the noise covariance matricies. These covariance matricies are parameters that can be tuned for better SLAM results.
$$Q = \begin{bmatrix} 0.1 & 0 & 0 \\ 0 & 0.1 & 0 \\ 0 & 0 & 0.1 \end{bmatrix} \hspace{20mm}
\bar{Q} = \begin{bmatrix} Q & 0_{3 \textrm{x} 2n} \\ 0_{2n \textrm{x} 3} & 0_{2n \textrm{x} 2n} \end{bmatrix} \hspace{20mm}
R = \begin{bmatrix} 0.1 & 0 \\ 0 & 0.1 \end{bmatrix}$$
Q is the process noise covariance matrix
\(\bar{Q}\) is the process noise expanded to fill the whole state
R is the sensor noise covariance matrix
Predicition
The first step to predicition is updating the state estimate using odometry.
$$\begin{equation} ξ^{-}_{t} = g(ξ_{t-1},u_{t},0) \end{equation}$$
Then, propagate the uncertainty using the linearized state transition model.
$$\begin{equation} Σ^{-}_{t} = A_{t}Σ_{t-1}A^{T}_{t}+\bar{Q} \end{equation}$$
The EKF uses a state transition model, \(g(ξ_{t-1},u_{t},0)\), that is linearized about the current state estimate.
In equation (3), \(A_{t}\) is the deviative g with respect to the state, \(g'(ξ_{t-1},u_{t},0)\), used in the linearization.
\(A_{t}\) has two equations.
No Rotation:
$$\begin{equation} A_{t} = g'(ξ_{t-1},u_{t},0) = I +
\begin{bmatrix} P_{1} & 0_{3 \textrm{x} 2n} \\ 0_{2n \textrm{x} 3} & 0_{2n \textrm{x} 2n} \end{bmatrix} \end{equation}$$
$$P_{1} = \begin{bmatrix} 0 & 0 & 0 \\ -Δx_{t}\sin(θ_{t-1}) & 0 & 0 \\ Δx_{t}\cos(θ_{t-1}) & 0 & 0 \end{bmatrix}$$
Rotation:
$$\begin{equation} A_{t} = g'(ξ_{t-1},u_{t},0) = I +
\begin{bmatrix} P_{2} & 0_{3 \textrm{x} 2n} \\ 0_{2n \textrm{x} 3} & 0_{2n \textrm{x} 2n} \end{bmatrix}\end{equation}$$
$$P_{2} = \begin{bmatrix} 0 & 0 & 0 \\
-\frac{Δx_{t}}{Δθ_{t}}\cos(θ_{t-1})+\frac{Δx_{t}}{Δθ_{t}}\cos(θ_{t-1}+Δθ_{t}) & 0 & 0 \\
-\frac{Δx_{t}}{Δθ_{t}}\sin(θ_{t-1})+\frac{Δx_{t}}{Δθ_{t}}\sin(θ_{t-1}+Δθ_{t}) & 0 & 0 \end{bmatrix}$$
Update
The update step of the EKF is a loop for each measurement.
In this explanation, we will refer to the measurement as i and the associated landmark as j.
1) Calculate the theoretical measurement using the current state estimate.
$$\begin{equation} \hat{z}^{i}_{t} = h_{j}(ξ^{-}_{t}) \end{equation}$$
$$h_{j}(ξ^{-}_{t}) = \begin{bmatrix} \sqrt{(m_{x,j}-x_{t})^{2}+(m_{y,j}-y_{t})^{2}} \\ \textrm{atan2}(m_{y,j}-y_{t},m_{x,j}-x_{t})-θ_{t} \end{bmatrix}$$
\(\hat{z}^{i}_{t}\) is the theoretical range and bearing from the robot to landmark
2) Calculate the Kalman gain using the linearized measurement model.
$$\begin{equation} K_{i} = Σ^{-}_{t}H^{T}_{j}(H_{j}Σ^{-}_{t}H^{T}_{j}+R)^{-1} \end{equation}$$
$$H_{j} = h_{j}'(ξ^{-}_{t}) =
\begin{bmatrix} 0 & \frac{-δ_{x}}{\sqrt{d}} & \frac{-δ_{y}}{\sqrt{d}} & 0_{1 \textrm{ x } 2(j-1)} & \frac{δ_{x}}{\sqrt{d}} & \frac{δ_{y}}{\sqrt{d}} & 0_{1 \textrm{ x } 2n-2j} \\
-1 & \frac{δ_{y}}{d} & \frac{-δ_{x}}{d} & 0_{1 \textrm{ x } 2(j-1)} & \frac{-δ_{y}}{d} & \frac{δ_{x}}{d} & 0_{1 \textrm{ x } 2n-2j} \end{bmatrix}$$
$$δ_{x} = m_{x,j}-x_{t}$$
$$δ_{y} = m_{y,j}-y_{t}$$
$$d = δ_{x}^2+δ_{y}^2$$
3) Calculate the posterior state update
$$\begin{equation} ξ_{t} = ξ^{-}_{t}+K_{i}(z^{i}_{t}-\hat{z}^{i}_{t}) \end{equation}$$
\(z^{i}_{t}\) is the measured range and bearing from the robot to landmark
4) Calculate the posterior covariance
$$ \begin{equation} Σ_{t} = (I-K_{i}H_{j})Σ^{-}_{t} \end{equation} $$
5) Update state and covariance for next measurement (i)
$$ Σ_{t}^{-} = Σ_{t} $$
$$ ξ_{t}^{-} = ξ_{t} $$
With all this functionality in the nuslam library,
I wrote a ROS node called slam
that subscribes to the calculated odometry and noisy landmark data then implements an EKF to localize the robot.
Figure 10. SLAM simulation in progress. The yellow cylinders are the landmarks. The green path following the stray axis is the ground truth location of the robot. The red path shows the SLAM estimate of the robot's location The purple path shows the odometry estimate of the robot's location.
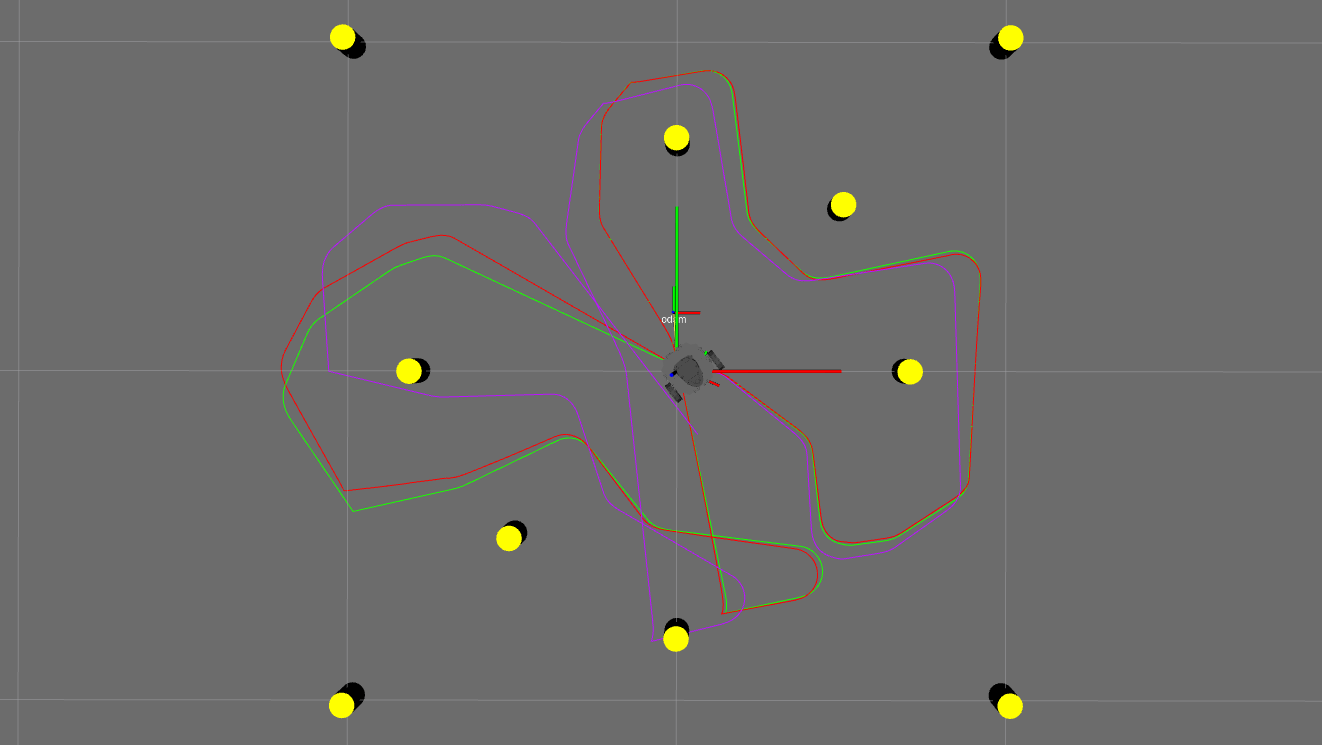
Figure 11. Result of SLAM simulation shown in figure 11. The yellow cylinders are the landmarks. The green path shows the ground truth location of the robot. The red path shows the SLAM estimate of the robot's location The purple path shows the odometry estimate of the robot's location. Results demonstrate that the SLAM algorithm is more accurate than odometry.
Circle Regression
With SLAM working in simulation, I moved onto circle regression. The Turtlebot lidar gives range and bearing of obstactles in the environment. Using this lidar data, I wanted to detect the tube obstactles because they are used as the landmarks in the SLAM algorithm. Following the trend of this project, I implemented this in simulation prior to deploying on the real robot. This makes it easier to debug while developing. To implement this in simulation, I had to create fake lidar data. This was more complicated than expected because ROS sensor_msgs/LaserScan presents lidar data using an angle increment and time increment. I imagined this as lines coming out of the robot at the specific angle increment. This meant I would have to intersect these lines with the tubes in the simulation environment to fake the lidar data. Also, to ensure my circle regression algorithm was working, I had to incorporate lidar data that was not tubes in the environment. To do this, I simulated a wall around the simulation environment. I implemented functions for circle-line intersection and line-line intersection in a namespaced titled cl. The math for circle-line intersection is well described here. The math for line-line intersection is basic algebra, so I will not go into the details. These function were used to create fake lidar data. I implemented a publisher with the fake lidar data in the tube_world ROS node. With the fake data, I then designed and implemented a clustering algorithm in a ROS node titled landmarks. This help the robot identify landmarks from the lidar data.
Figure 12. Demonstration of the fake lidar data. Lidar readings accumulate around landmarks and at walls. Notice that ocluded landmarks are undetected. Lidar has a set range, so distant landmarks/walls are also undetected.
Next Steps
Unfortunately, I no longer have access to a TurtleBot. My pipeline is near complete, and I plan to finish it when I can. The next step would be to associate the detected circles with landmarks in the SLAM algorithm. I would do this by calculating the distances between the detected landmark and the SLAM state estimation of landmark locations. If the shortest distance is below a defined threshold, I would associate the measurement with its closest landmark. If the shortest distance is above the defined threshold, I would initialize a new landmark in the SLAM algorithm. Then, I would just need to test, debug, and refine using the physical TurtleBot. I should have access to TurtleBot near the end of 2021.